
- 2021-03-14 20:48:59
-
●综合了高效生产和严格的品质管理。
●全球多面体反射镜市场占有率第一。
●利用敝司独特的“空气动力轴承”技术,实现了激光扫描仪超高速旋转下,同时保持低振动和长寿命。
●也可用标准滚球轴承扫描仪。
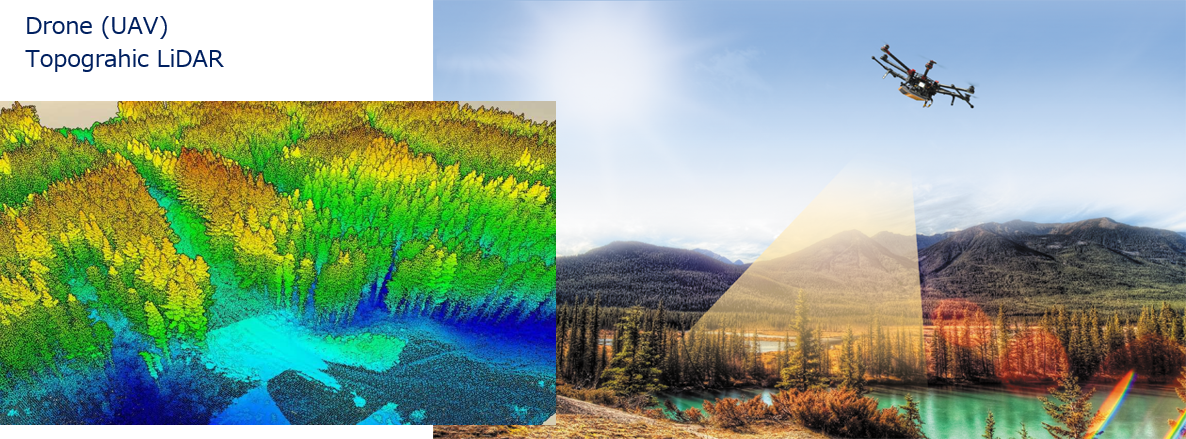
●激光雷达用激光扫描仪目前正在设计开发中。多边形激光扫描器是激光雷达理想的扫描方法
激光雷达需要快速,高精度,可靠的全场光栅扫描。为此,几十年来多边形激光扫描器一直主导着激光雷达的扫描。一个引人注目的市场是使用激光雷达,在无人机中进行地形测试和其他3D测绘行业中的应用。
在这种情况下,飞机的运行就决定了扫描的Y轴。 X轴需要多边形激光扫描器来快速扫描就可完成。此外,在自动驾驶车辆中避免碰撞行驶是一个众所周知的典型激光雷达应用,大多数应用使用多边形扫描仪进行快速和长距离X轴扫描。而检流计可用于慢速和短距离的Y轴扫描理想。

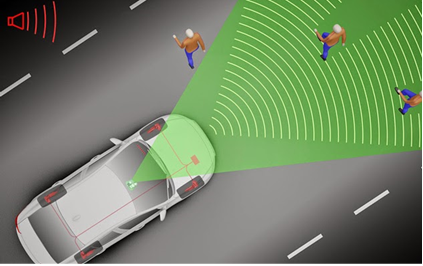
可变式视场角激光雷达在自动驾驶车辆中的优势自动驾驶配备各种传感器来确定它们的位置和周围环境。传感器包括,惯性导航系统(INS)与全球卫星定位系统(GPS),摄像机,雷达和激光雷达。激光雷达比传统毫米波雷达具有更高的分辨率,并且黑暗环境中也可以检测。
本文讨论使用激光雷达的优化方案,以避免车辆路径中的碰撞。涉及激光雷达为了创建三维图像,快速扫描一个或多个二维红外激光扫描在内。 在这里,我们将使用带有振镜扫描仪的多边形激光扫描器在可变的垂直扫描角度内移动一个或多个激光,将比较以固定的垂直扫描角旋转雷达和检测器的垂直阵列。
众所周知,激光雷达扫描技术是旋转激光垂直阵列,让垂直方向360度水平扫描。典型的配置有30度扫描的16个激光器的垂直阵列。垂直分辨率为2度。在图1中示出了30度扫描。
[图 1] 用于避免碰撞的30度激光雷达扫描
30度垂直扫描可以检测,自动驾驶车辆前方靠近的道路上的物体,也可以检测到上下斜坡的停车场的障碍物。固定的2度垂直分辨率,在10米的距离处提供350毫米的光束间距。光束间距在50米的距离上增加到1.75米,使得很难探测到行人或汽车,在100米的距离上增加到3.5米,使得很难探测到卡车。
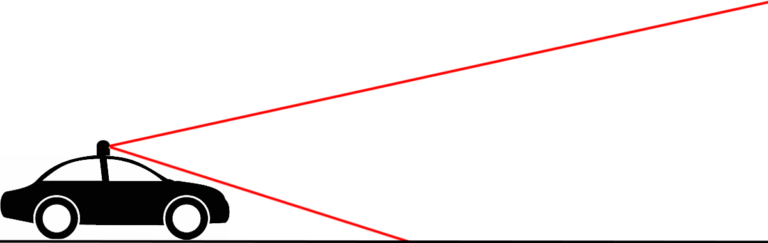
接近山丘时,感兴趣的区域可以20度扫描,如下面的图2所示。
[图 2] 激光雷达20度扫描接近山丘
在山顶上,感兴趣的区域可以立即向下移动,10度扫描。如下面的图3所示。
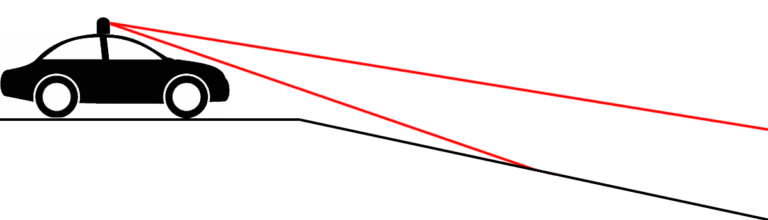
[图 3] 激光雷达10度扫描爬山
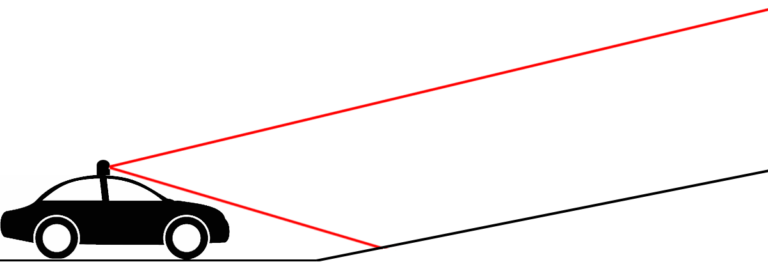
以公路速度行驶,感兴趣的区域可以水平10度扫描。。如下面的图4所示。

[图 4] 激光雷达高速驱动10度扫描
如果激光雷达的多边形/振镜扫描只有16线垂直分辨率(如上图1所示)。在高速行驶时将低速时的入射角30度降低到10度,使分辨率提高三倍,从而在更高速度下提供更长的防撞范围。
多边形/振镜激光雷达系统,如何把入射角适应于不断变化的环境呢? 在低速时,入射角30度扫描可用于AV前方里,方便扫描车辆上方的停车障碍物。 随着速度的增加,停止距离也增加,需要更长的扫描距离。这时无需寻找停车障碍物,所以无需看车辆前方两米,因此入射角缩小与速度有关。
至于接近山顶,激光雷达会定期(取决于速度,可每秒钟一次)快速探测哪处需要调整入射角。 该过程还将自动补偿由于道路中的负载,加速,制动和颠簸引起的车辆俯仰。
旋转激光器与旋转激光束。16组垂直激光器和探测器的旋转头很昂贵的。增加更多激光器和探测器以提高分辨率会增加此类激光雷达的成本和尺寸。
多边形扫描仪比带有16个激光器和探测器,旋转得快得多。 因此,多边形扫描仪能够以较少的激光获得较高分辨率的图像,并且针对感兴趣区域有效地扫描。
例如,一个四面多边形,仅移动八个固定激光器的光束,以速度5,000 rpm扫描,垂直分辨率为2667条/秒,120度水平扫描。在10 Hz,非隔行扫描下,检流计式垂直分辨率267条。在100m和10度入射角下,这给出了66mm的垂直分辨率。
- 激光雷达按距离分辨率计算图表
与MEMS微振镜比较
几年前,MEMS微振镜承诺是一种低成本的多边形和振镜扫描仪的的替代品。 有人认为MEMS是固态技术,但事实并非如此。MEMS是小而易碎的机械反射镜。扫描速度是温度的函数,易被车辆运行扰乱,无法分辨它指向的位置。在速度上,MEMS扫描仪是一种共振式运作,中心高速驱动扫描速度最快,在每次扫描结束时最慢。这意味着扫描中心的分辨率最低,与激光雷达所需的分辨率相反。 多边形镜面通常是平坦的λ/ 4 @ 633nm。这对于数百米的高分辨率扫描非常有用。但MEMS反射镜上很难找到平坦度规格。薄而脆弱的MEMS镜面平坦度被描述为薯片!这限制了MEMS扫描范围非常短。MEMS反射镜悬浮在非常细的扭杆之间,这些扭杆在其寿命结束时会突然断裂。MEMS扫描仪是固态的说法是错误的。
多边形扫描仪和振镜扫描仪已用于地面和空中移动环境中的商用和军用激光雷达中,是最有实绩的激光扫描技术。多边形和振镜扫描仪具有更大的通光孔径,适用于较大的扫描角度和扫描范围中。具有竞争力的价格,已被证明适用于移动激光雷达中。
替代性技术: 多边形 vs. 振镜
1. 扫描角度
多边形 振镜 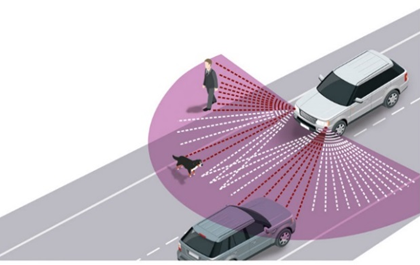
四面多边形将提供120度视场角。使用三面镜、
并且通过照射多个面可以实现360度视图。是
振镜扫描仪不可能实现的。通常限于+/- 20度机械角或80度光学角。 良好 低下 2. 速度稳定性
多边形 振镜 
多边形扫描仪可以以几百RPM到50K RPM的各
种速度运行,同时仍保持高速稳定性。 这使得
配备多边形的激光雷达单元能够在宽视场
(Field of View)下捕获高分辨率图像,即使是
长距离测量也是如此。振镜具有非线性扫描速率,这意味着
扫描速度在中心最快,在拐角处最慢
。 这会在车辆前方产生低分辨率图像
,在接近角落时产生高分辨率图像。良好 低下 3. 扫描速率和功耗
多边形 振镜 
多边形扫描仪可以快速扫描,功耗低,孔径大,具有
恒定的扫描速度,并且需要相对较低的功率。一般比
往复式振镜扫描仪的扫描速度快10倍。振镜扫描仪是往复式装置,在最大速度下,扫描速率
不是线性的,并且功耗非常高(可以达到数百瓦)。
小孔径振镜扫描仪可以快速扫描,但小孔径限制了扫
描范围。 顺便说一句,Y轴振镜扫描仪移动相对较慢
,因此功耗很低。良好 低下 4. 成本
多边形 振镜 激光雷达需要的不是最精确的振镜扫描仪,
而高可靠性至关重要。 高可靠性,高精度
的多边形扫描仪比振镜更具竞争力。低精度,低可靠性的振镜扫描仪的价格低于
100美元,但高可靠性,高精度的振镜扫描
仪价格高达数百美元。极好 良好 5. 热问题 / 寿命
多边形 振镜 寿命长。
耐温:可在高温和低温下运行。无需散热
片或主动冷却。需要直接散热。
这对于需要在诸如,炎热的夏日等变化环境中
使用的小型激光雷达扫描仪的设计来说并不理
想。还需要主动冷却。良好 低下
结论
多边形扫描仪具有优于振镜的优点。 操作范围灵活,高精度扫描,长寿命。 解决了低成本高效益。
当今一些最著名的机载激光雷达制造商正在使用振镜 - 振镜(双振镜的扫描方式)开始开发,因为它是一种通用的、现成的、易于实现的技术。 另一方面,多边形扫描仪在激光打印机市场之外并未得到很好的理解、是许多厂商的主要障碍。 这就是多边形扫描仪虽然具有振镜的优势,但大多数试图实现多边形扫描仪的OEM在其时间和成本预算内将无法取得成功的原因。
敝司的多边形反射镜的可靠性通过以下成就得到了证明
- 所有的多边形扫描仪都是定制的,可以做成各种各样的配置构造和尺寸。
- 成本效益
●示例估算:
直径为φ15mm,有4个镜面,厚度为2mm,涂有大量的保护SiO2涂层。 ⇒ 5美元以下
- 世界第一多面体反射镜供应商
●制造能力:
在过去十年中,每年生产超过100万个单位。
- 上一篇 [返回首页] [打印] [返回上页] 下一篇

激光雷达用多面体反射镜和激光扫描仪